Experiment Overview
Aircraft wings, helicopter rotor blades, and spacecraft solar panels are all flexible structures driven by servo actuators. Modeling them requires capturing not just the rigid-body motion of the actuator, but also the structural vibration modes of the flexible member attached to it. This lab derived the equations of motion for the SRV02 rotary flexible link system from first principles, experimentally identified the link’s stiffness from a free-oscillation test, and validated a 4-state state-space model against measured hardware responses.
- Derive the equations of motion for the servo-plus-flexible-link system using the Euler-Lagrange method
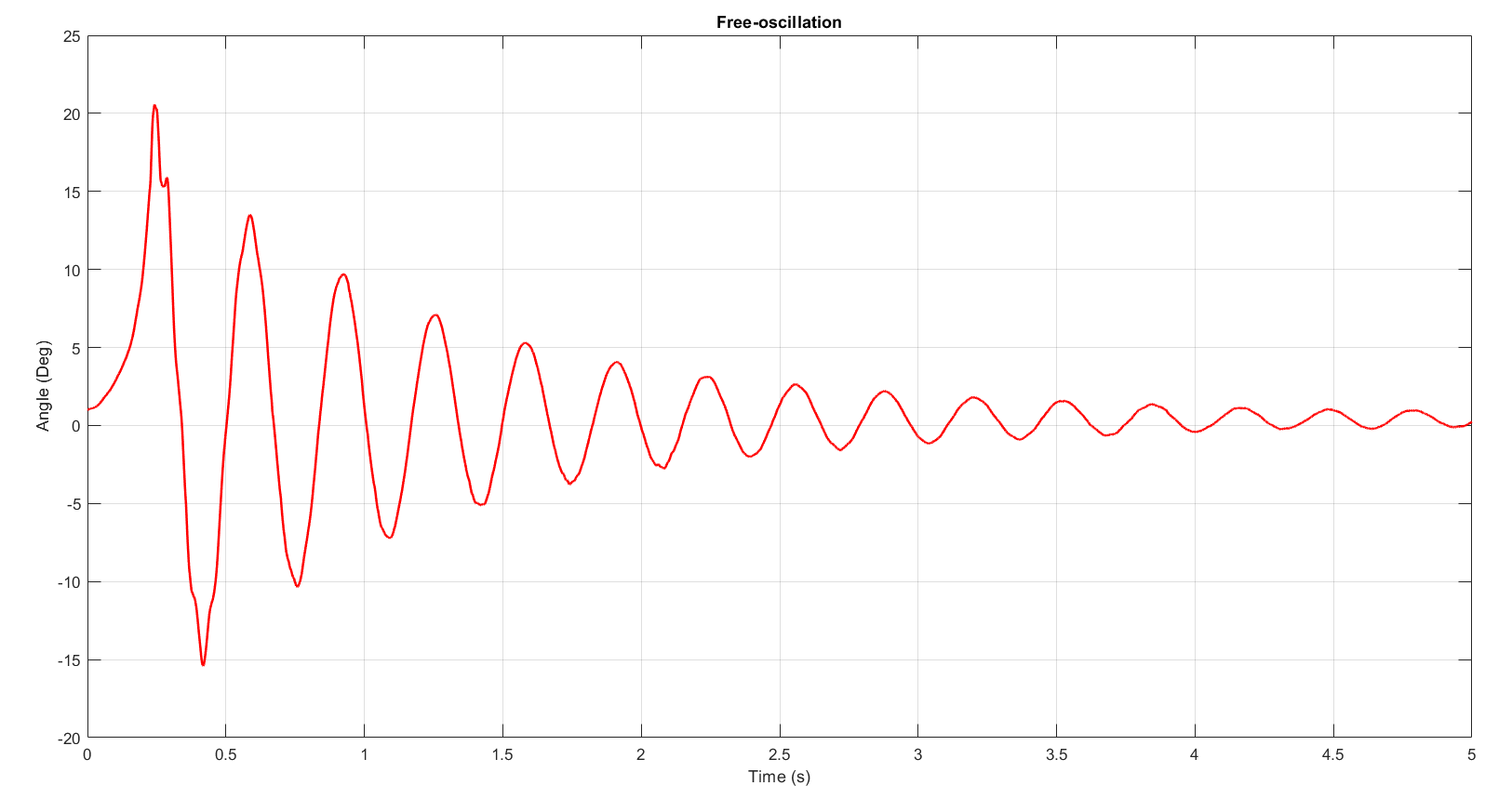
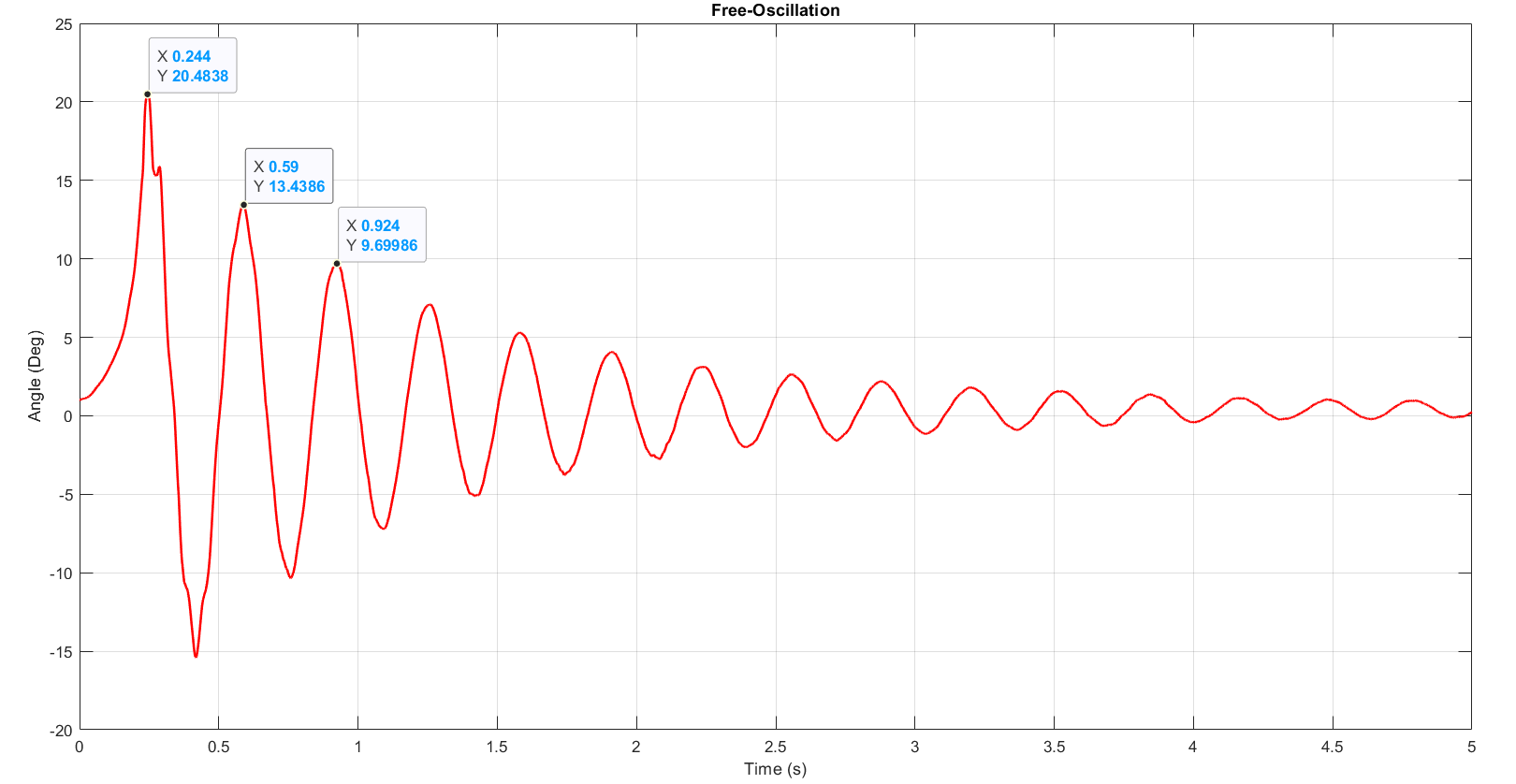
- Identify the link’s natural frequency ωn and rotational stiffness Ks from a free-oscillation decay experiment
- Build a 4-state state-space model (servo angle θ, link deflection α, and their derivatives)
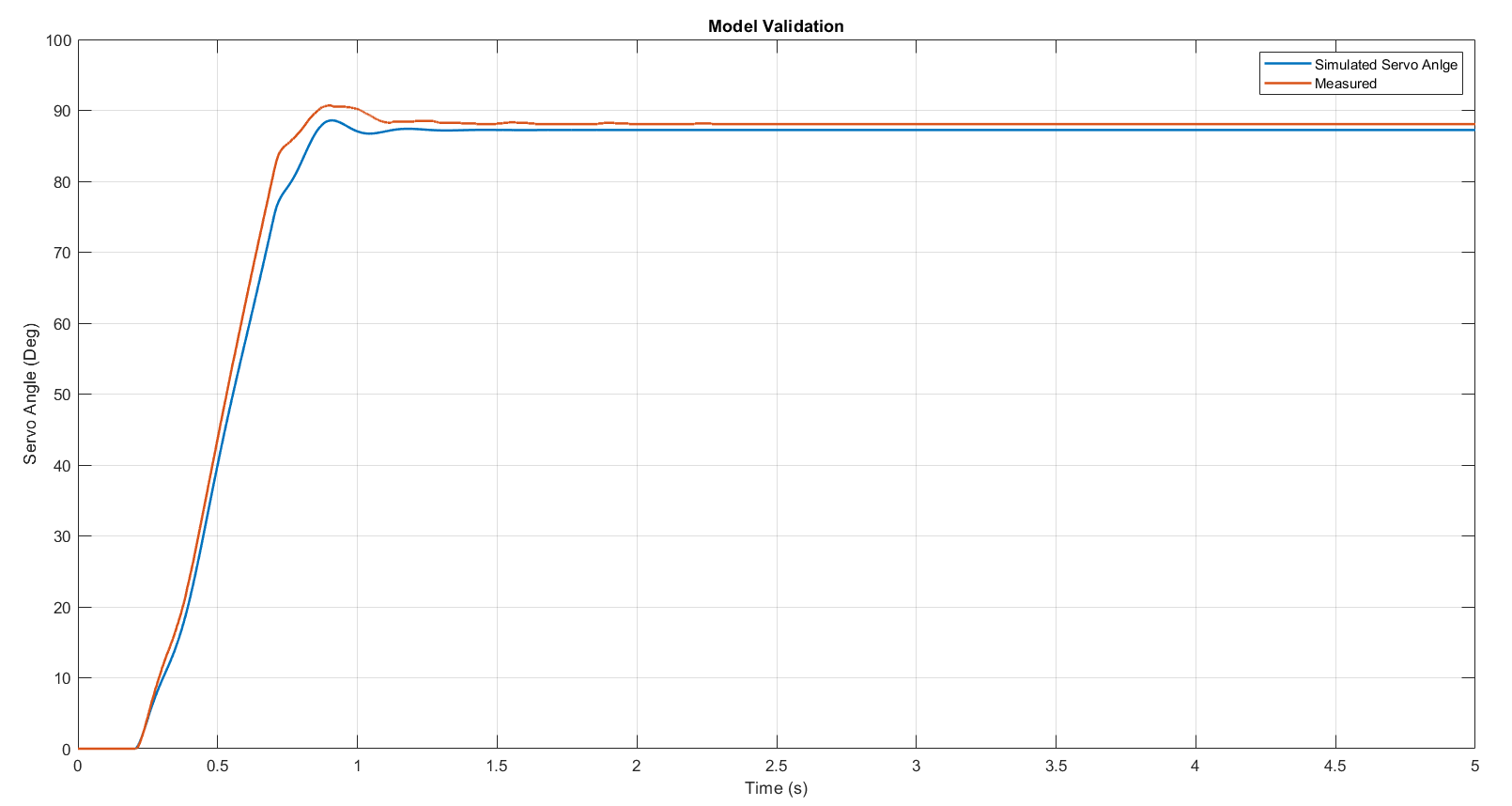
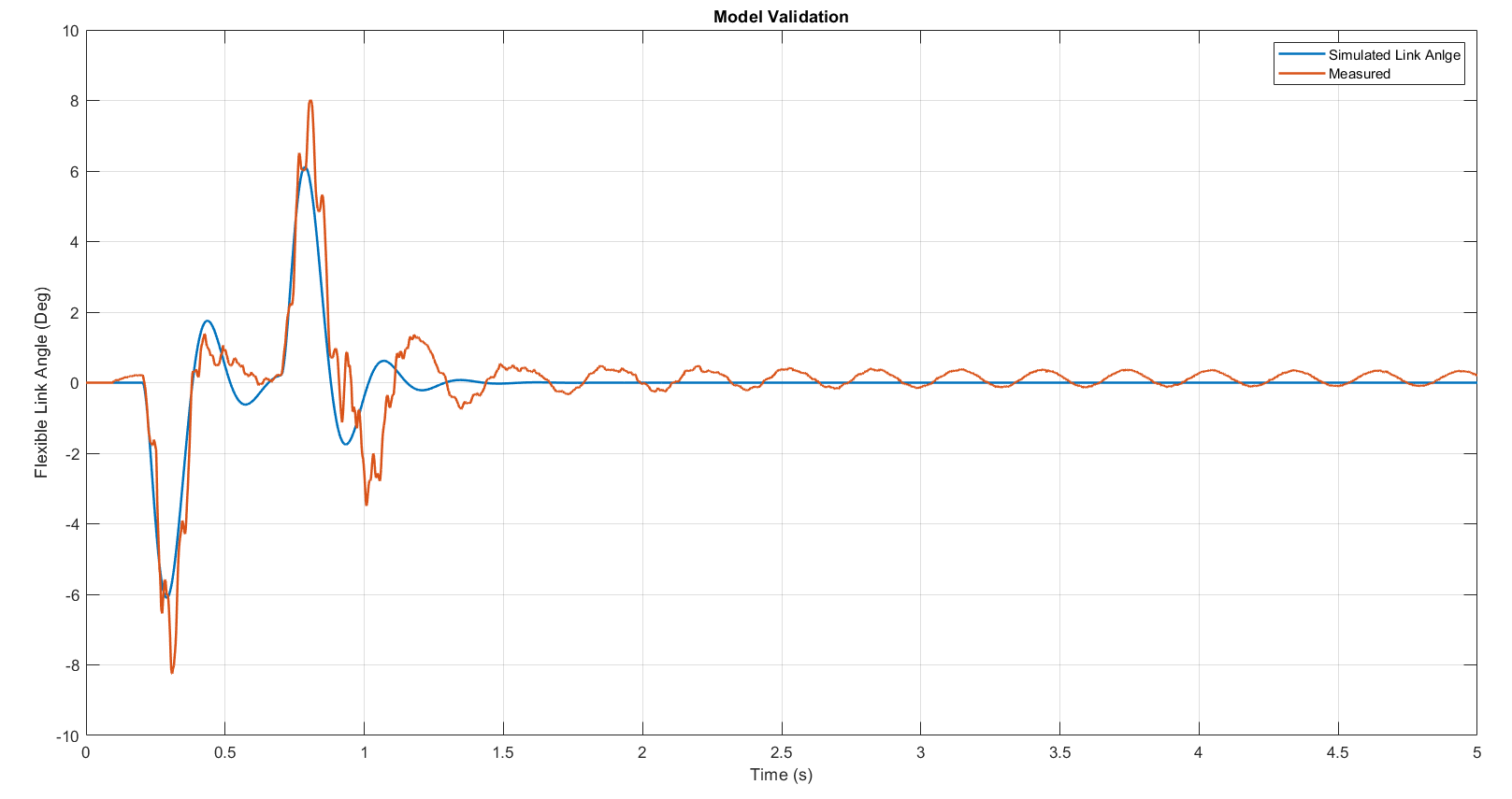
- Validate the model by comparing simulated and measured responses to a step motor command